本文
「知の拠点あいち重点研究プロジェクトIV期」 国内初,自動運転車を遠隔から走行支援する 遠隔型自動運転システム「遠隔アシスト」の実証実験を行います
愛知県と公益財団法人科学技術交流財団(豊田市)では、産学行政連携の研究開発プロジェクト「知の拠点あいち重点研究プロジェクト※1IV期」を2022年度から実施しています。「プロジェクトDX※2」の「自動運転サービスを実現する安全性確保技術の開発と実証※3」では、名古屋大学の金森 亮(かなもりりょう)特任教授の他、愛知工業大学、株式会社エクセイド(名古屋市中区)、株式会社ポットスチル(名古屋市中区)、MS&AD(エムエスアンドエーディー)インターリスク総研株式会社(東京都千代田区)及びあいおいニッセイ同和損害保険株式会社(東京都渋谷区)の研究グループが、早期の自動運転サービス提供に向けて、車内ロボットや遠隔監視・支援システム※4を活用した情報提供や安全性確保の技術開発に取り組んでいます。
この度、プロジェクトの最終成果に向けて2024年12月20日(金曜日)に知の拠点あいち(豊田市)にて報道機関を対象とした公開実験を実施しますのでお知らせします。
公開実験では、公道で実際に遠隔型自動運転システム「遠隔アシスト」※5を利用するデモを実施します。プロジェクトの達成状況を確認するとともに、研究開発の今後の指針とします。
1 公開実験
(1)日時
2024年12月20日(金曜日)
午後1時から午後3時まで(受付開始:午後0時30分)
荒天の場合は中止します。当日午前10時に、以下の知の拠点あいち重点研究プロジェクトWebサイトの「お知らせ欄」において、開催又は中止について掲載します。
URL https://www.astf-kha.jp/project/

二次元コード
(2) 会場
「知の拠点あいち」あいち産業科学技術総合センター 3階302室
(豊田市八草町秋合1267-1 電話:0561-76-8306)
建物西側の来客用駐車場をご利用下さい。
※会場にて、遠隔運転操作のデモ(図右イメージ)を見ていただきます。
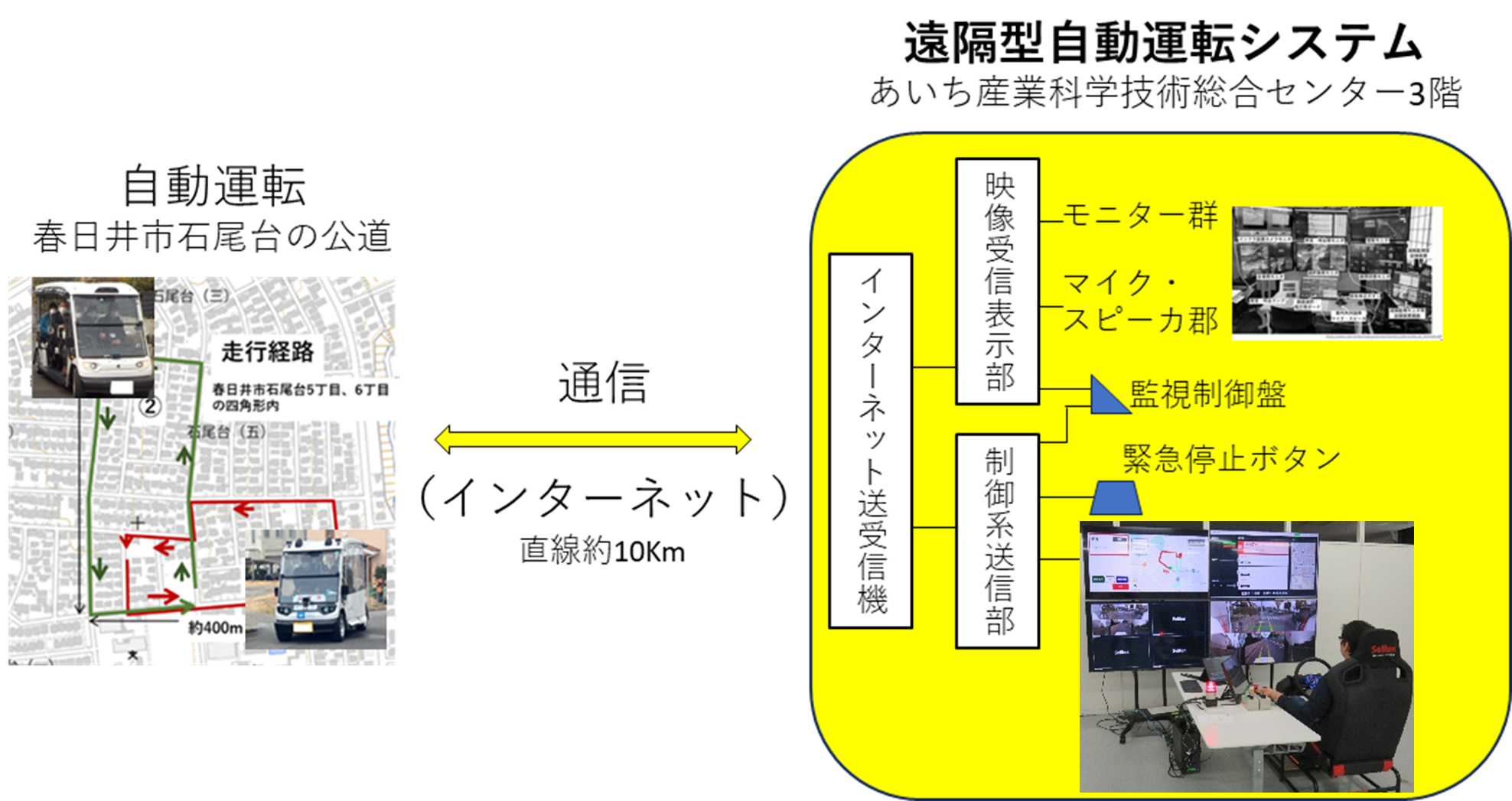
図1 公開実験の概要
(3) 対象
報道機関
※参加者数把握のため、前日午後5時までに必ず御連絡をお願いいたします。
一般の方は御覧いただけません。
(4)連絡先
公益財団法人科学技術交流財団 知の拠点重点研究プロジェクト統括部 佐野
電話:0561-76-8370
(5)実験日のスケジュール
|
時間 |
内容 |
|
13時00分~13時20分 |
あいち産業科学技術総合センターにて全て説明を行います。 現状サービス※6(公共ライドシェア(自家用有償旅客運送)の自動運転車両導入)と本実験の概要、自動運転システム、遠隔監視・支援システムを紹介。 名古屋大学未来社会創造機構 特任教授 金森 亮氏 |
|
13時20分~13時30分 |
公道にて実際に遠隔運転するデモを実施。 【見どころ】 生活道路の路上駐車を認識して安全停止した後、路上駐車を追い抜く状況を実演します。車両からの映像を遠隔監視・支援システムのモニターで御覧いただきます。 |
|
13時30分~15時00分 |
質疑応答及び、遠隔監視・支援のデモをいくつか実施します。 |
|
15時00分 |
終了 |
2 開発の背景
狭い路地の含まれる住宅街での自動運転サービスを想定した場合、駐停車車両や歩行者と遭遇することで車両に装備された自動運転システムだけでは対応できない状況となります。補助ドライバーによる手動介入が必要となることが多くなると想定されます。しかしながら、そのような状況においても安全性を確認・確保し、自動運転サービス再開をする技術・手順の議論については、不十分であるのが現状です。本テーマでは、車内ロボットや遠隔監視・支援システムの利用を想定し、車両に装備された自動運転システムだけでは対応できない状況から自動運転を再開するための、課題解決を目指しました。
3 開発の概要
(1)自動運転車の遠隔アシストの開発
障害物回避など自動運転の継続が困難な状況でも、手動介入することなく自動運転システムを継続させ、走行を継続することを狙いとして、レベル4自動運転で遠隔支援システムが海外では導入されています。本プロジェクトでは、将来的に遠隔監視・操作者の負担を軽減する遠隔支援(リモート・アシスタンス)が一般化すると想定し、「遠隔アシスト」の技術及び利用手順を開発しました(図2)。
今回の公開実験では本技術について紹介します。

図2 自動運転車の遠隔型自動運転システムにおける遠隔アシスト
(2)高リスク地点を自動特定する技術
自動運転サービスの走行経路について、定量的なリスクアセスメント※7を行うことが求められています。そこで、リスク指標を動画データから算出し、高リスク地点を自動特定する技術を開発しました(図3)。本技術により、重点的に安全性を確認・確保すべき場所を客観的に事前に把握できるようになります。
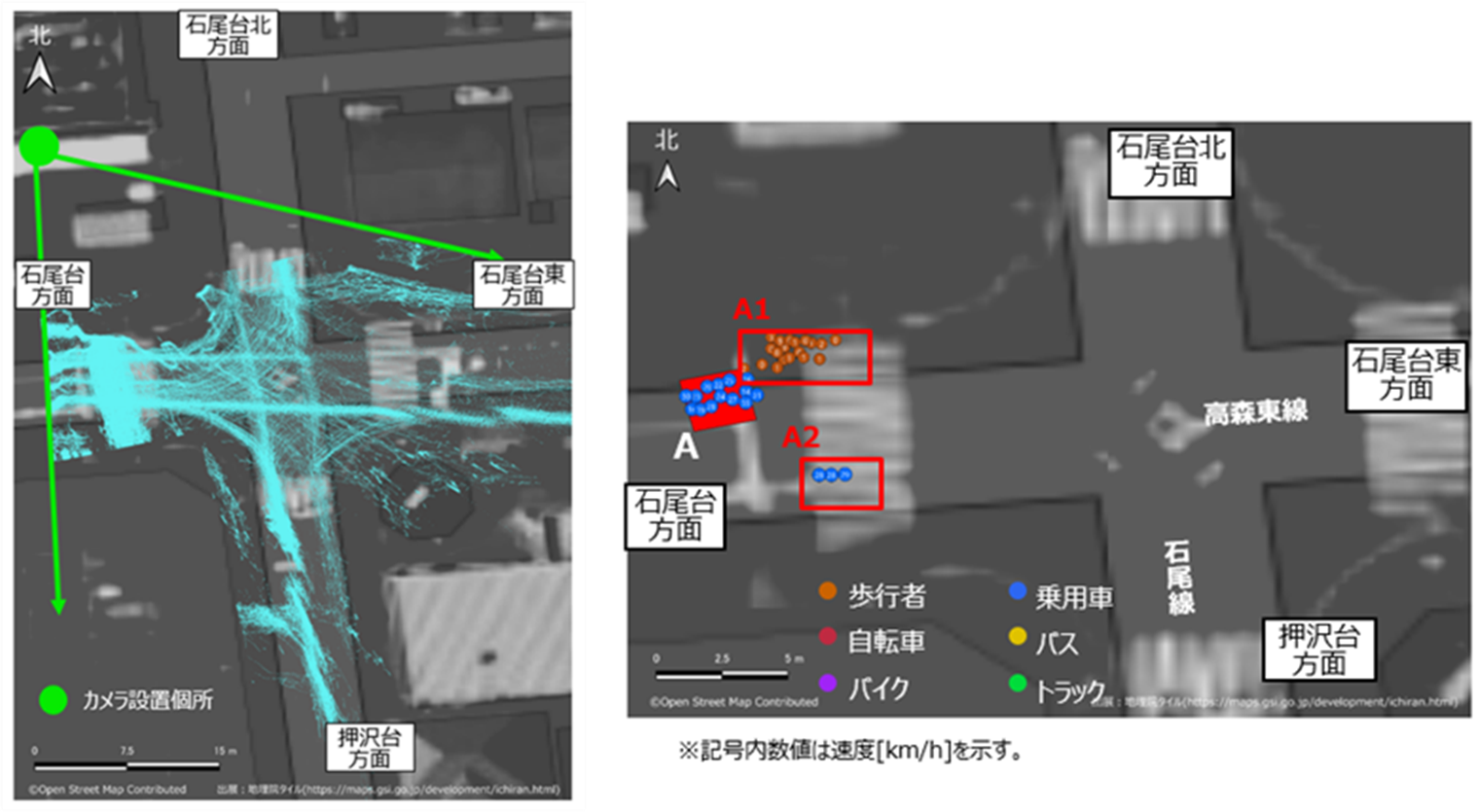
図3 高リスク地点を自動特定する技術
左:動画から車両・人の干渉する可能性を抽出
右:干渉頻度の高い場所を特定
(3)車内ロボットを用いた状況説明技術
高蔵寺ニュータウンではオンデマンド型自動運転サービスを地元住民NPOが運行しています。利用者の方々からは、自動運転車両がどのように判断して動くのかが不安などの声がありました。そこで、自動運転車両が停車や右左折する際、自動運転システムの判断根拠など、利用者へ円滑な情報提供をおこなう技術として、自動運転システムと連動した車内ロボットを開発しました。また、高蔵寺ニュータウンにて実際に利用者を対象とした評価実験を行い、有効性を確認しました(図4)。
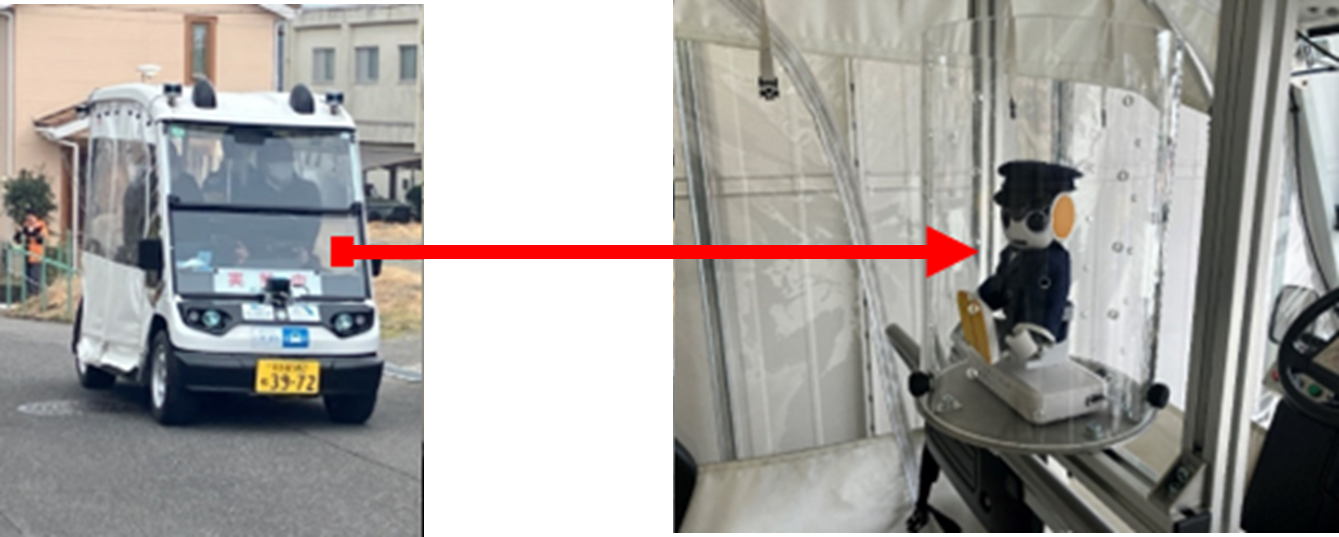
図4 車内ロボットを用いた状況説明技術
助手席付近にロボットを設置
(4)遠隔運転の通信遅延対策技術
遠隔運転時の通信遅延対策として、現在位置予想や停止位置予想を遠隔運転用のコックピット映像に提示することを目指し、車両挙動モデル開発のためのセンサー配置方法を開発しました(図5)。
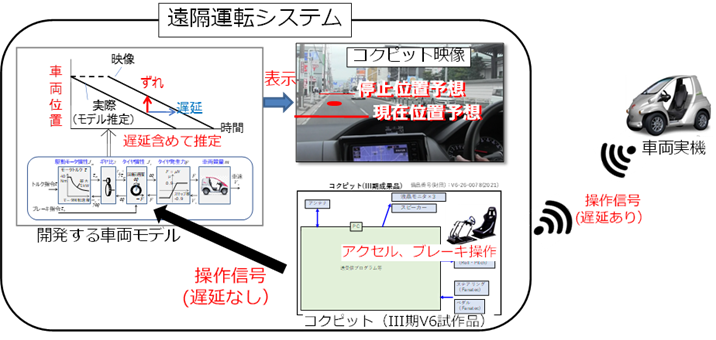
図5 遠隔運転の通信遅延対策技術
4 期待される成果と今後の展開
今後、障害物回避など自動運転が困難なさまざまな状況に対して、前述した開発技術の効果を検証することにより、これまで承認されることが困難だった、レベル4自動運転での遠隔運転が早期に実現されることが期待されます。
今後は、現行の春日井市での自動運転サービスを実施するなかで、高リスク地点を中心に継続的に開発技術を評価し、インフラ協調システム※8とも連動しながら、自動運転サービスの技術改良を重ねてゆく予定です。
5 社会・県内産業・県民への貢献
|
社会への貢献 |
従来、自動運転サービスが困難だった住宅の密集した路地等に対しても、補助ドライバーの介入が不要となる自動運転サービスを早期に実現できる。 |
|
県内産業への貢献 |
都市部、山間部を問わず自動運転サービスを展開できるため、自動運転車両製造、サービス事業が活発になる。 |
|
県民への貢献 |
特に高齢者にとって、県内における移動困難が幅広く解消され、県民の安全・安心、生活クオリティの向上に貢献できる。 |
6 問合せ先
【重点研究プロジェクト全体に関すること】
あいち産業科学技術総合センター 企画連携部企画室
担当:日渡、佐藤、村上
所在地:豊田市八草町秋合1267番1
電話:0561-76-8306
公益財団法人科学技術交流財団 知の拠点重点研究プロジェクト統括部
担当:佐野、安藤、金田
所在地:豊田市八草町秋合1267番1
メール:juten-dx@astf.or.jp
電話:0561-76-8370 (*原則、メールにてお問合せ下さい)
【公開実験内容及び本開発内容に関すること】
国立大学法人東海国立大学機構名古屋大学 未来社会創造機構
モビリティ社会研究所
担当:金森 亮
所在地:名古屋市千種区不老町(ふろうちょう)
メール:kanamori.ryo@nagoya-u.jp(*メールにてお問合せ下さい)
【用語説明】
※1 知の拠点あいち重点研究プロジェクト
付加価値の高いモノづくりを支援する研究開発拠点「知の拠点あいち」を中核に大学等の研究シーズを活用したオープンイノベーションにより、県内主要産業が有する課題を解決し、新技術の開発・実用化や新たなサービスの提供を目指す産学行政の共同研究開発プロジェクト。2011年度から2015年度まで「重点研究プロジェクトI期」、2016年度から2018年度まで「重点研究プロジェクトII期」、2019年度から2021年度まで「重点研究プロジェクトIII期」を実施し、2022年8月から「重点研究プロジェクトIV期」を実施している。
「重点研究プロジェクトIV期」の概要
|
実施期間 |
2022年度から2024年度まで |
|
参画機関 |
16大学 7研究開発機関等 88社(うち中小企業59社) (2024 年11月時点) |
|
プロジェクト名 |
・プロジェクトCore Industry ・プロジェクトDX ・プロジェクトSDGs |
※2 プロジェクトDX
|
研究テーマ |
【研究開発分野】デジタルテクノロジー・ICT D1 モノづくり現場の試作レス化 /DXを加速するトライボCAE開発 D2 DXと小型工作機械が織り成す機械加工工場の省エネ改革 D3 MIをローカルに活用した生産プロセスのデジタル革新 D4 IT・AI技術を結集したスマートホスピタルの実現 D5 繊維産業に於けるAI自動検査システムの構築に関する研究開発 D6 〈弱いロボット〉概念に基づく学習環境のデザインと社会実装 D7 愛知農業を維持継続するための農作業軽労化汎用機械の開発と普及 D8 自動運転技術のスマートシティへの応用 D9 自動運転サービスを実現する安全性確保技術の開発と実証 |
|
参画機関 |
7大学 4研究開発機関等 30社(うち中小企業19社)(2024年11月時点) |
※3 自動運転サービスを実現する安全性確保技術の開発と実証
|
研究リーダー |
名古屋大学 未来社会創造機構 モビリティ社会研究所 社会的価値研究部門 特任教授 金森 亮 氏 |
|
事業化リーダー |
株式会社エクセイド 杉山 順子 氏 |
|
参加機関 (五十音順) |
〔企業〕 株式会社エクセイド、株式会社ポットスチル、あいおいニッセイ同和損害保険株式会社、MS&ADインターリスク総研株式会社 〔大学〕 名古屋大学(名古屋市),愛知工業大学(豊田市) 〔公的研究機関〕 あいち産業科学技術総合センター(豊田市) 公益財団法人科学技術交流財団(豊田市) |
※4 遠隔監視・支援システム
あいち産業科学技術総合センター3階302室に、「無人自動運転等の先進 MaaS 実装加速化推進事業(自動運転レベル4等先進モビリティサービス研究開発・ 社会実証プロジェクト(テーマ 1))」報告書(国立研究開発法人産業技術総合研究所、ヤマハ発動機株式会社、三菱電機株式会社、株式会社ソリトンシステムズ)の「4.4.1 遠隔システム、管制システムの構成」に沿った遠隔システムを設置しました。
※5 遠隔アシスト
名古屋大学、株式会社エクセイド、株式会社ソリトンシステムズが協同で、遠隔監視・操作者がボタン操作等の簡易な操作によって自動運転の走行を補完・支援することができる遠隔型自動運転システム。
※6 現状のサービス
特定非営利活動法人石尾台おでかけサービス協議会、春日井市、名古屋大学、株式会社エクセイド、KDDI株式会社が、相互連携して2023年2月1日から実施している、同協議会(住民主体)のオンデマンド型の有償送迎サービス。
※7 定量的なリスクアセスメント
従来のリスク分析では、評価者が数段階のリスク度合を点数として記入した表に基づき、分析します。定量的な方法では、例えば、交差点のリスク分析を行う場合、一定時間カメラで交差点を撮影し、その映像に対して、人およびクルマとのインタラクション(人が横断歩道を渡る前にクルマの来ないことを確認後し渡る、など人とクルマとが互いに影響し合うこと)のあった件数(およびその位置)すべてに基づいて、インタラクションの多い地点を高リスクとして、分析します。
※8 インフラ協調システム
見通しが悪い交差点(自動運転車搭載センサーの検知範囲外)において、インフラ側(電柱、街灯、信号機など)にカメラ、レーダー、ライダー等のセンサー(インフラセンサーと呼ぶ)を設置し、無線通信により自動運転車が自車センサーとインフラセンサーとを組み合わせて利用するシステム。
このページに関する問合せ先
あいち産業科学技術総合センター企画連携部
企画室(担当:日渡、佐藤、村上)
豊田市八草町秋合1267-1
電話:0561-76-8306
