本文
【変更】常滑市内における自動運転実証実験の実施について
(注)1月25日(木曜日)の知事及び報道関係の試乗について、スケジュール等を一部変更しました。
(注)一般試乗の運行ダイヤを一部変更しました。
中部国際空港島及び周辺地域において自動運転の社会実装を見据えた実証実験を実施します
愛知県は、全国に先駆けて2016年度から自動運転の実証実験を積み重ね、自動運転技術の向上とともに、ビジネスモデルの構築や社会的受容性の醸成を図ってきました。
本年度も、社会実装に向けた取組を更に深化させ、技術面、安全面、事業面からの検証を行うことで交通事業者等が実運行で再現可能なビジネスモデルの構築を目指し、3地域で実証実験を行います(2023年6月12日発表済み。)。
この実証実験の一環として、中部国際空港・常滑市りんくう町において、「一般客向けの定期運行」をテーマに、空港利用者等の移動手段を想定した実証実験を行います。
本年度は、バス型車両での3か月間の長期に渡る運行を行い、実装に向けた様々な気象環境下における課題を抽出します。また、将来の無人自動走行を想定し、車内乗務員が不在の状況で緊急事態が発生した際の対処方法を検討します。さらに、5G※1・AI等の技術を活用し遠隔管制※2者がいち早く走行ルート上の危険を検知することで、車両側のセンサーでは死角になる箇所の危険を回避します。
これらの検証結果を、将来の県内市町村や交通事業者による自動運転技術の実装につなげてまいります。
1 実施日程
2024年1月25日(木曜日)、1月28日(日曜日)から3月10日(日曜日)までの毎週日曜日、3月13日(水曜日)から15日(金曜日)まで(計11日間)
(注)天候等の条件により、内容が変更になる場合があります。
|
日程 |
ルート |
発車時刻 |
試乗者 |
|---|---|---|---|
|
1月25日 |
イオン→空港 |
午後1時/午後1時40分/午後2時20分 |
メディア関係者 |
|
午後3時30分 |
愛知県知事 |
||
|
1月28日 |
イオン→空港 |
・イオン発 ・空港発 |
実証実験関係者 |
|
3月13日(水曜日)から3月15日(金曜日)まで |
イオン→空港 |
■実証実験関係者 ■一般試乗者 |
(注)当日の運行状況等によりダイヤが変更となる場合があります。
乗降場所
イオン:イオンモール常滑シャトルバスのりば
空 港:中部国際空港内シャトルバスのりば(9番)
ルート詳細(S:出発点/G:終着点)
【イオン→空港】

【空港→イオン】

(参考)常滑市の取組について(2023年12月19日常滑市発表)
(注)実施内容が変更されました。詳細は、常滑市HPを御確認ください。
常滑市では、これまでの愛知県による実証実験の成果をもとに、将来の地域への導入を見据えて、市独自での実証実験を実施します。
運行概要
1.運行期間
2024年1月16日(火曜日)から1月26日(金曜日)まで
(注)調律含む
2.運行ルート
常滑駅~りんくう常滑駅~ウィンボとこなめ~常滑駅

3.運行車両
いすゞ自動車 エルガ
4.自動運転レベル
レベル2(2025年に一部レベル4化を目指した実証)
2 使用車両
|
車両 |
自動運転システム構築企業 |
試乗定員/便 |
仕様 |
|---|---|---|---|
|
小型バス型車両
|
先進モビリティ株式会社 |
最大11人 |
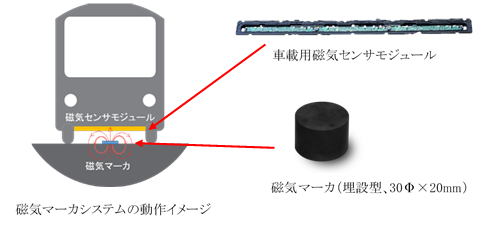
GNSS※3高精度位置情報、磁気マーカシステム「GMPS」※4、3D(三次元)地図を組み合わせ、自車位置検出を冗長化した自動運転システム |

3 事業実施体制
|
企業名 |
主な役割 |
|
|---|---|---|
|
エヌ・ティ・ティ・コミュニケーションズ株式会社 |
事業統括、車両調達、AI映像解析※5技術、5Gを活用したソリューションの提供 |
|
|
株式会社NTTドコモ |
遠隔管制システムの提供、通信環境構築 |
|
|
|
株式会社東海理化 |
遠隔監視の映像を統合するシステムの提供 |
|
先進モビリティ株式会社 |
自動運転バス車両の提供、走行調律作業の実施 |
|
|
名鉄バス株式会社 |
遠隔管制者、車内保安員、交通事業者としての運行支援 | |
|
イオンモール常滑 |
遠隔管制室の設置場所提供等 |
|
| 中部国際空港株式会社 |
停留所等の施設提供 |
|
|
ENWA株式会社 |
映像伝送システムの提供 | |
| 愛知道路コンセッション |
フィールド提供 |
|
4 本実証実験の特徴
バス型車両は、乗用車に比べて車体が大きく、車重が重いため、機敏な加速、減速及び操舵が困難であることから、自動運転時においても、よりスムーズな制御が必要とされます。このため、磁気マーカ等も活用し、荒天時を含めた安全・安心でスムーズな自動走行を目指した実証実験を行います。
(1) 荒天時の安定走行を目指した技術検証
本実証実験で走行する一般自動車専用道路(中部国際空港連絡道路)は、強い横風、雨、雪等の天候の影響を受けるため、高度な自動走行技術が求められます。あらゆる環境でも自動走行できることを目指して、年間を通して最も走行が困難な冬期に実証を行います。GNSSと3Dマップ方式に加えて、中部国際空港連絡道路の一部に埋設した磁気マーカを活用し、自己位置推定技術の冗長化を図り、荒天時における安定走行の実現を目指します。
(2) 自動走行率の向上に向けた車両制御技術の向上
将来的な運転席無人での自動走行を実現するためには、カメラやセンサーを活用したセンシング技術の精度向上による道路環境や交通状況に応じた車両制御が必要です。そこで、本実証実験では、停車車両の自動回避や信号認識精度の向上を目指した検証を行います。
〔1〕停車車両の自動回避
車両に搭載したセンサーや障害物認識用のカメラ、ミリ波レーダーを用いて停車車両を検知します。検知した停車車両から安全な回避距離を保ちながら自動運転バスが自律的に回避することを検証し、技術面の課題抽出を行います。
〔2〕信号認識精度の向上
露出補正※6の機能が優れた逆光に強いカメラ搭載することで、西日等の影響が想定される環境でも信号認識できることを検証します。インフラ通信に頼らず車両に搭載されたカメラのみで信号認識することで、自動運転システム構築のコストの低減を目指します。
(3) 社会的受容性の検証
当エリアへの来訪者が多い日曜日を中心として、3か月間の長期に渡る自動走行を行うことにより、様々な気象環境や交通状況において検証を行います。また、約500名の一般来訪者に試乗機会を提供し、社会受容性向上に向けて自動走行時に不安を感じた頻度やシーンを集計することで、利用者が安全・安心を感じるバス型車両の制御を検証します。
併せて、将来的な立席での乗車を目指した安定的な車両制御の検証を行うことで、輸送力を確保し、移動ニーズに対応した自動運転技術による輸送サービスの構築を目指します。本実証実験では、一般道での時速50km走行時及び一般自動車専用道路での時速60km走行時を含めて、立席での乗車も行い、安定的で揺れの少ない自動走行を検証します。
(4) 遠隔管制システムを活用した緊急時の対応オペレーションの検討
将来的な運転席無人の自動運転バスの実現には、車両内外で発生した事故等の緊急事態に対して、遠隔管制システムを通じて状況を把握し、適切なオペレーションを行うことが必要です。
本実証では、運転席無人での運行時に、バス車内で転倒事故が発生したという想定のもと、車内に設置したスピーカー・マイク・カメラにより遠隔管制員と乗客が映像と音声を通じてコミュニケーションを図り、適切な対応を行うための手順を検証します。このため、緊急時の対応訓練を受けていない一般客とのコミュニケーションのあり方や状況把握に必要となる映像や音声の品質、車両設備等の課題の洗い出しを行います。
交通事業者を交えた無人自動運転における緊急事態対応の検証は、自動運転の社会実装に向けて必要不可欠な取組となります。
(5) 5GやAI映像解析技術等を活用した危険個所リスクの検出
本実証では、7台の車載カメラとイオンモール常滑周辺に設置した4台の路側カメラを、5G等に接続して映像を伝送し、車両周囲の状況を遠隔管制システムに一元的に表示します。
より実践的なものとするため、AI映像解析等の技術により、画面上に映るすべての人・車両等ではなく、経路上又は経路上に侵入してくると予想される車両等を検出し、遠隔管制員に対して注意して監視すべき対象をモニター上で強調して表示します。これにより、将来的な複数台の同時走行における遠隔管制員の負荷軽減を目指します。
5 一般の方の試乗について
(1) 日程
| 1月 | 28日(日曜日) |
|---|---|
| 2月 | 4日(日曜日)、11日(日曜日)、18日(日曜日)、25日(日曜日) |
| 3月 | 3日(日曜日)、10日(日曜日)、13日(水曜日)、14日(木曜日)、15日(金曜日) |
(2) 予約方法
事前予約や座席の確保は行いませんので、御乗車を希望される方は、当日受付にお越しください。
受付は、イオンモール常滑シャトルバスのりばと、中部国際空港内シャトルバスのりば(9番)の2か所に設置しております。
(注)天候等の条件により、内容が変更になる場合があります。
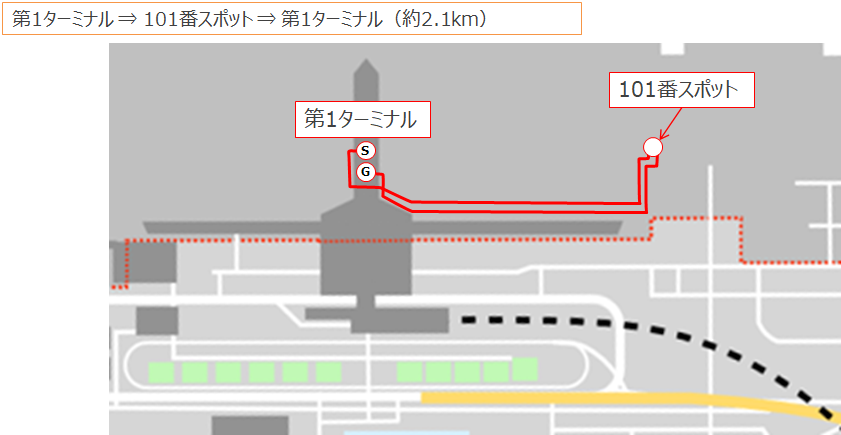
6 空港制限区域内での実証について
空港制限区域内において旅客輸送を行うランプバス※7を想定した参考実証を行います。小型バスを用いて、実際に駐機する航空機付近における自動運転の制御精度を検証します。実際に運用されている航空機付近で自動走行を行うことは、国内の空港において先進的な取り組みとなります。
(1) 日程及びルート
|
日程 |
ルート |
発車時刻 |
試乗者 |
|---|---|---|---|
|
3月11日(月曜日) |
第1ターミナル国内線搭乗口~ |
午後2時/午後2時30分/ |
実証実験関係者 |
(注)天候等の条件により、内容が変更になる場合があります。
(注)空港制限区域内の実証では一般試乗は実施しません。
(2) 使用車両
2 使用車両と同様
用語説明・補足
|
※1 5G |
通信キャリアがサービスとしてスタートした第5世代移動通信システム。高速、大容量通信が特徴。 |
|
※2 遠隔管制 |
自動運転車両の運行を遠隔からの映像をもとに管理・制御すること。 |
|
※3 GNSS |
Global Navigation Satellite Systemの略。人工衛星から発射される信号を用いて自己位置などの測位を行う技術。 |
| ※4 磁気マーカシステム「GMPS」 | 道路に敷設された磁気を発するマーカ(磁気マーカ)を、車両に取り付けられた磁気センサーモジュールで読み取り、車両の自己位置を正確に特定する方式。 「GMPS(Global(グローバル) Magnetic(マグネティック) Positioning(ポジショニング) System(システム))」は、愛知製鋼株式会社の登録商標。 |
| ※5 AI映像解析 |
AIにあらかじめ車両や人物等を学習させ、カメラに映った映像の内容を解析する技術。 |
| ※6 露出補正 |
映像を明るくしたり、暗くしたりする調整機能。 |
| ※7 ランプバス |
空港施設(ターミナルビル)と、空港施設から離れた駐機場との間の乗客輸送を行うバス。 |
このページに関する問合せ先
愛知県経済産業局次世代モビリティ産業課
自動車産業グループ
電話:052-954-6136
メール:jisedai@pref.aichi.lg.jp
